飞檐走壁,这个机器人身手不一般
——2025年度河北科学技术奖巡礼(六)
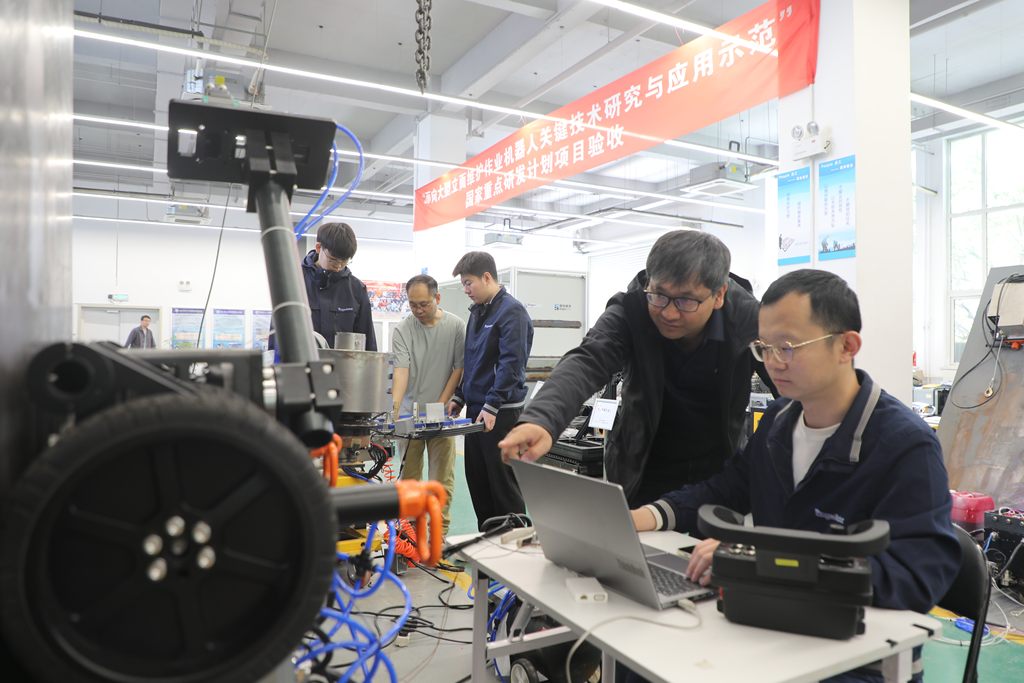
4月27日,在彼合彼方机器人(天津)有限公司一楼试验区,张小俊(右二)正指导工程师对喷漆机器人进行调试。屠琼芳摄
前进,后退,原地360°灵活旋转……4月27日,在彼合彼方机器人(天津)有限公司(以下简称“彼合彼方”)一楼试验区,工作人员拨动控制器摇杆,一款机器人紧贴在曲面钢板上稳定爬行,敏捷自如,酷似“蜘蛛人”。
别看它个头不大,“手艺”却胜过老师傅。
以喷涂为例,1个机器人能代替16个工人,由于一致性更好、精准度高,相比人工作业能节省10%的原材料。
这是爬壁机器人,由河北工业大学与彼合彼方合作研发,能代替人工实现对金属立面的喷砂除锈、拉毛、喷涂、检测等多项功能。
前不久,他们凭借这项技术捧回了河北省科技进步奖一等奖。
2018年,河北工业大学教授张明路、张小俊在浙江舟山调研时,抬头看到作业的工人吊坐在悬空木板上,晃晃悠悠,十分危险。一调查才知道,每年都有因高空重复性作业而发生的事故。
“能不能研发一款高空作业机器人,用来替代工人从事高空高危作业?”那一年,在国家重点研发计划的支持下,他们将目标锁定金属立面维护领域,和团队一起着手爬壁机器人研究。
让机器人在曲面上吸得住、走得动,团队想出了永磁吸附的办法。
“与电磁吸附不同,永磁吸附在断电等极端情况下仍能保证机器人不会坠落,安全性大幅提升。”张小俊告诉记者。
但吸力太大,机器人无法灵活移动甚至会“趴窝”;吸力不足,又会引发机器人打滑、坠机。
为了适配吸附力、驱动力和重力三者之间的关系,团队成员反复调校,在实验室里打磨了大半年,终于研制出了第一台样机。这是一台自重200公斤的大家伙,设计负载能力也在200公斤以上。
然而现实却给他们泼了一盆冷水。
现场测试时,随着一声响,机器人因磁力设计和自重的失衡,瞬间打滑脱落。张小俊回忆说:“本以为实验室的数据万无一失,但现实根本不是那么回事。”
怎么办?机械工程师、材料工程师、控制工程师围在一起反复讨论,改模型、调算法,反复测试了几十种方案。
一次次试错之后,他们将机器人自重优化到了80公斤,在重量和磁力之间找到了平衡。
“做了这么多技术成果,样机也做成功了,但距离成果落地,总是差一步。”张明路说,他不想把技术成果“锁在抽屉里”。
这份“不甘心”,让他在56岁那年决定走出“舒适区”。2020年11月,张明路辞去学校行政职务,创立彼合彼方,开启创业之路。
“工程环境与实验室环境大相径庭,机器人投入工程应用后,需要在实际场景中不断打磨改造,才能具备出色的环境适应能力和可靠性。”张明路说。
彼合彼方接到的第一个订单,来自中油管道防腐工程有限责任公司。
储罐的高度在几十米以上,需要定期进行喷漆、清洗、除锈等防腐工作。以前这些工作需要由人工完成,维修时间长、劳动强度大。多年来,他们一直在寻找机器代替人工的方案,但大多数特种机器人公司的产品种类单一,无法满足储罐维护的复杂需求。
一次偶然的机会,中油管道防腐工程有限责任公司找到了彼合彼方。团队成员扎在工地,实地测试机器人性能,收集操作反馈,并不断对机器人进行改进优化。2021年3月,第一款储罐多功能爬壁特种机器人交付使用。
实际场景中的使用与验证,让特种机器人产品更加符合市场需求,产品订单也多了起来。他们的产品接连应用于大连、舟山等地的储罐项目,在国内首次实现规模化应用,达到国际先进水平。
创新没有终点。目前,河北工业大学已联合彼合彼方研发出立面除锈、喷涂、检测等六类20余款机器人,覆盖石化、风电、核电、储罐等应用场景,在众多头部企业实现工程应用。
从河北工业大学出发,开车5分钟就能到公司。这是张小俊经常走的路。
他告诉记者,这种“出门即到”的距离,让他们可以充分依托学校优势资源,开展产学研联合攻关。他指导的研究生和博士生也经常到公司来,借助先进的设备开展试验,跟专业的研发工程师实践学习,参与项目研发。
“我希望学生们可以多实践,发现真问题、解决真问题。这次获奖的项目,就有学生的参与。”张小俊感到非常骄傲。
此时,彼合彼方的试验区里一派忙碌,工程师正带着学生们测试分析合作项目的相关数据。
“与靠磁力吸附在金属表面的爬壁机器人不同,想要让机器人吸附在建筑物上,得靠别的方式。”张小俊透露,他们正联合彼和彼方开拓非金属立面领域,预计今年年底研发出第一款负压吸附机器人,应用到更多复杂场景中。
编辑:李耀荣
来源:河北日报客户端原标题:2025年度河北科学技术奖巡礼丨飞檐走壁,这个机器人身手不一般





 广告
广告



 广告
广告

 广告
广告


